Project 2: Code Scanning Robotic Arm
Project Overview
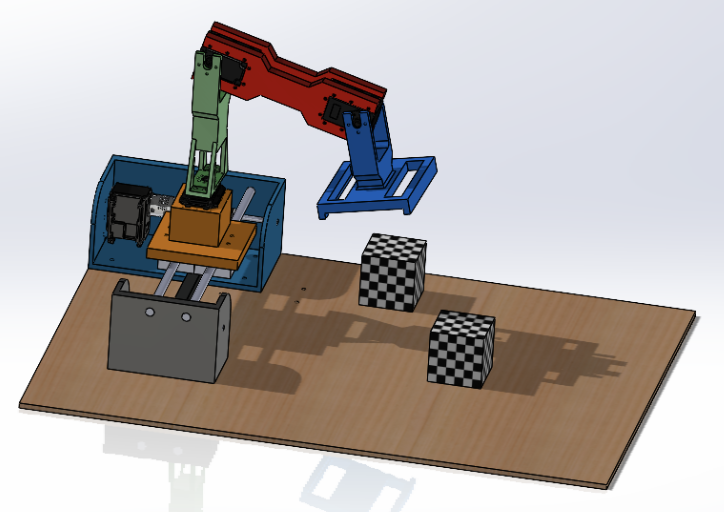
The 4 degree of freedom robotic arm is designed with the intention to simplify the mundane task of scanning QR codes in a warehouse setup and hence automatically generating inventory for last warehouses.
My Contributions
I was the member of the controls team, where my main contribution was development of the inverse kinematics(IK) for the designed robot and implement it using a MATLAB script.
In addition to solving the IK geometrically & algebraically, I also contributed towards the design of prismatic joint(double railed) for the robot